Evolutionary robotics takes inspiration from natural evolution to automatically design robot bodies and brains (neural networks) and to understand evolution of living systems. From an artificial intelligence perspective, we are interested in open-ended evolution, evolution of multi-cellular soft robots, and evolution of swarming systems. From a biological perspective, we are interested in understanding the evolutionary emergence and principles of cooperation, competition, division of labour, and communication.
We are also interested in promoting the understanding and study of evolution by means of software and hardware educational tools. We developed RoboGen™, an open-source software for the co-evolution of neural controllers and body shapes in physics-based simulations where evolved body parts can be 3D-printed and assembled with low-cost, off-the-shelf electronic components.
Featured Paper
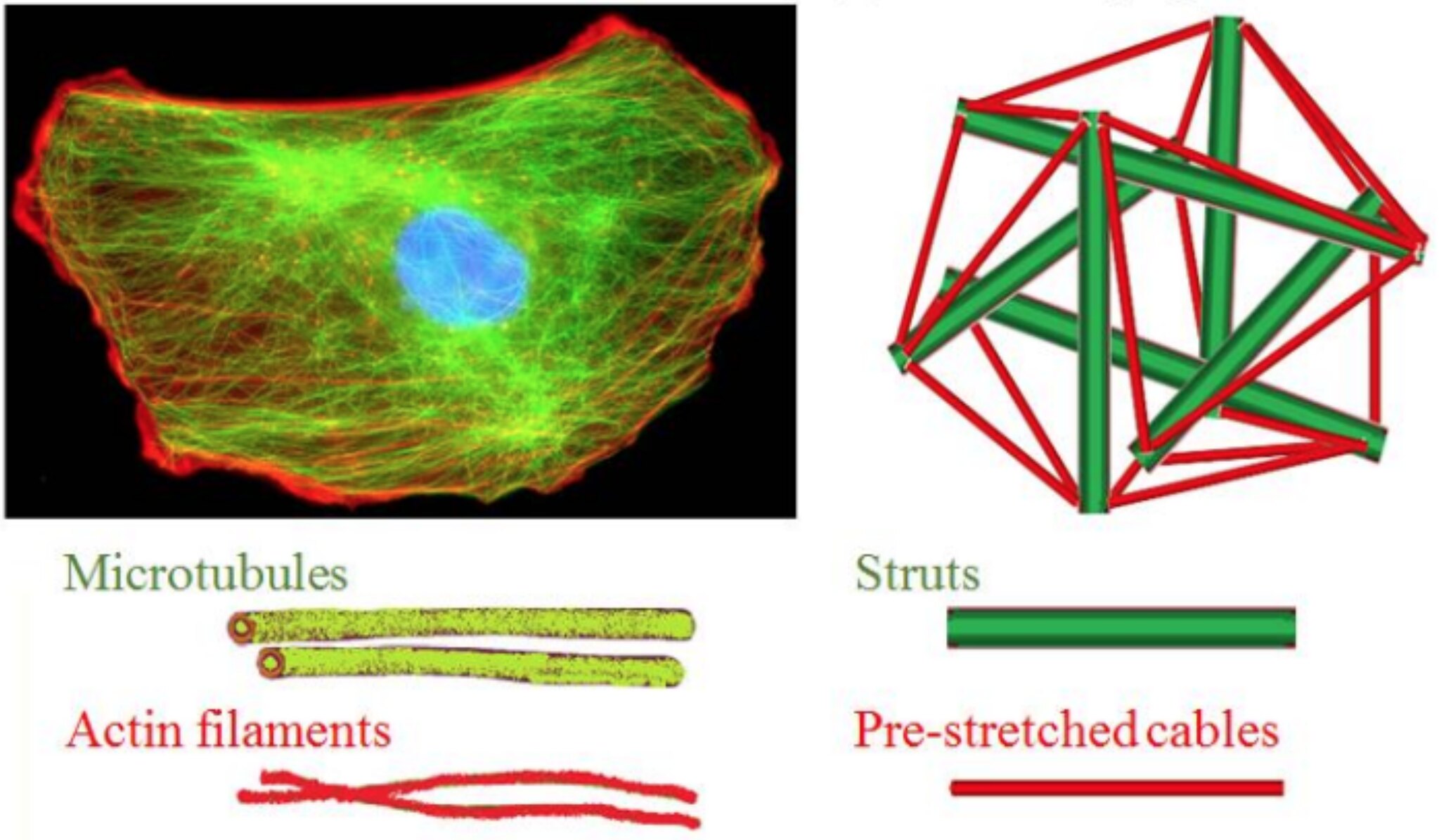
Bio-inspired Tensegrity Soft Modular Robots – Infoscience – link
Embed of video is only possible from Mediaspace, SwitchTube, Vimeo or Youtube
Related Publications
Infoscience search shortcode: Please check the url